Project Overview
At the DLR department Robotics and Mechatronics in Munich, I wrote my thesis on thermal modeling and testing the Mars Moon eXploration (MMX) rover. The MMX rover is planned to travel to Phobos, one of the two moons of Mars, aboard a Japanese spacecraft.
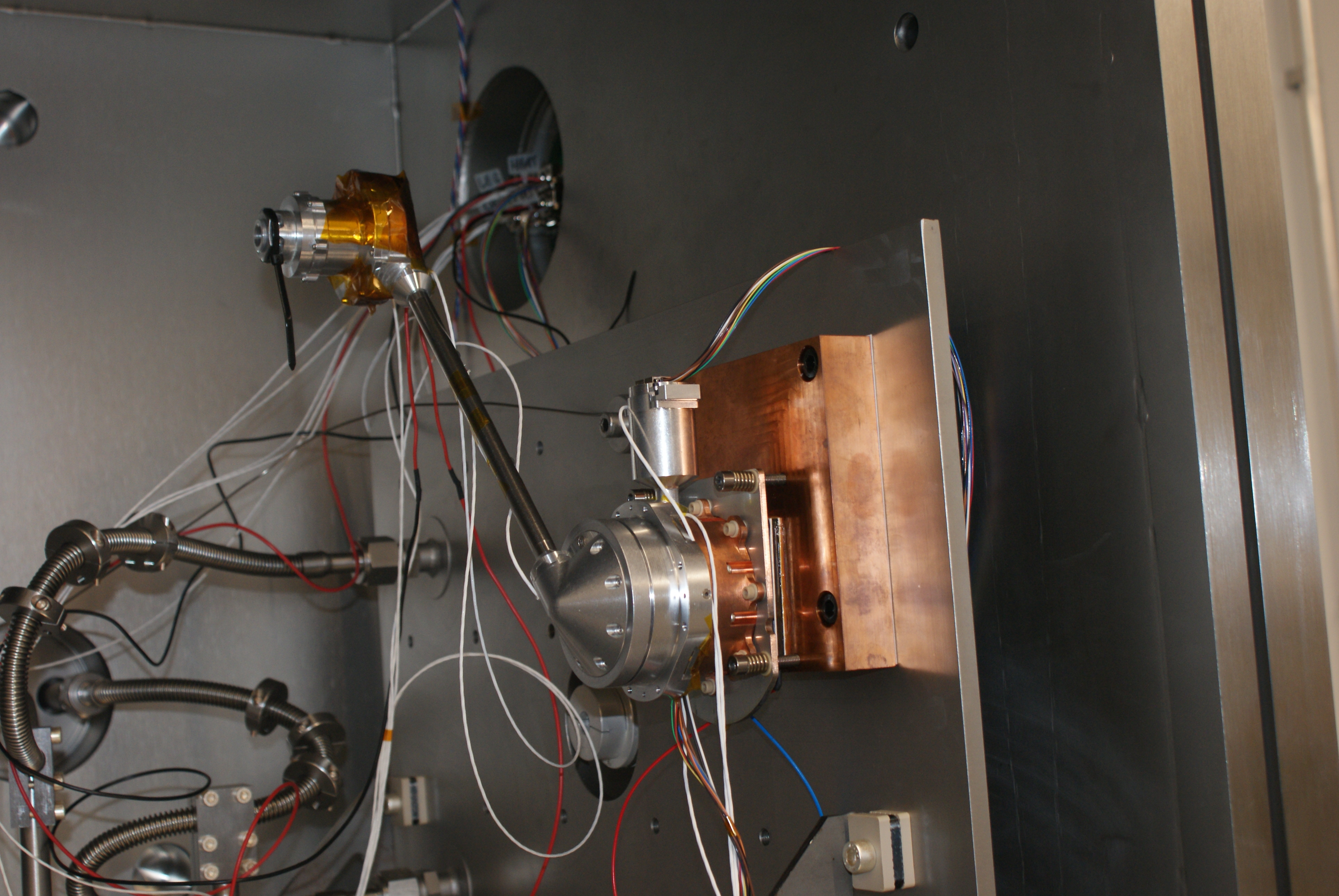
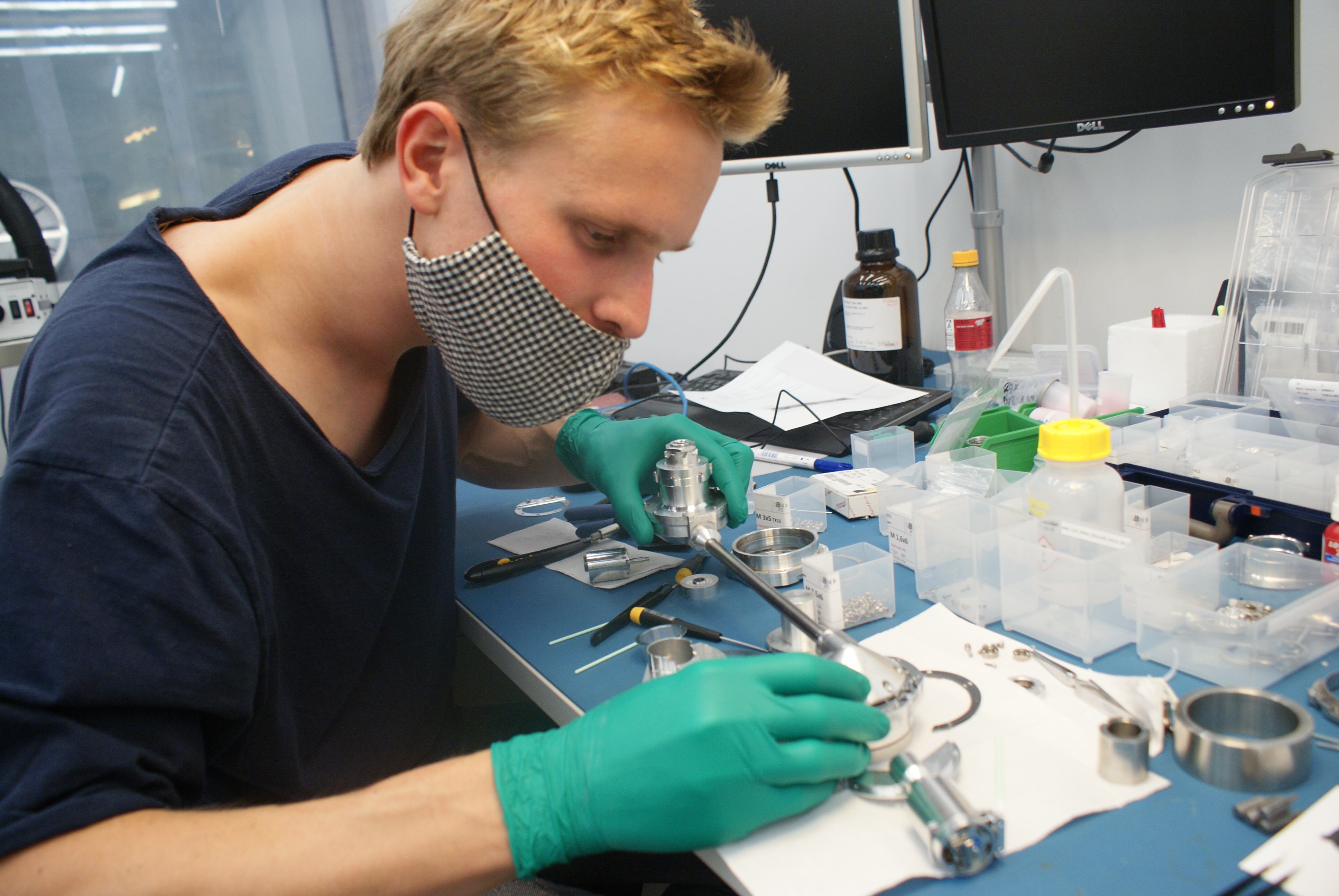
The rover will be exposed to an extremely tough thermal environment, therefore thermal analysis and testing is vital for mission success. The research focuses on the locomotion system — a complex and dynamic subsystem with the objective to ensure the rover stands up after landing and is able to drive around on Phobos. My objective was to perform thermal modeling and simulations on the locomotion subsystem, determine test requirements and boundary conditions, and demonstrate functionality and performance of the locomotion subsystem in the expected thermal-vacuum environment via long duration, automated testing.
Publications
Functional and thermal testing the Mars Moon eXploration (MMX) rover locomotion system
European Space Thermal Engineering Workshop 2020 · October 2020
Developing thermal testing methods for a locomotion system of a Phobos rover
TU Delft · November 2020
Open-Source Packages
Three Python packages were developed during this research and published on GitHub.
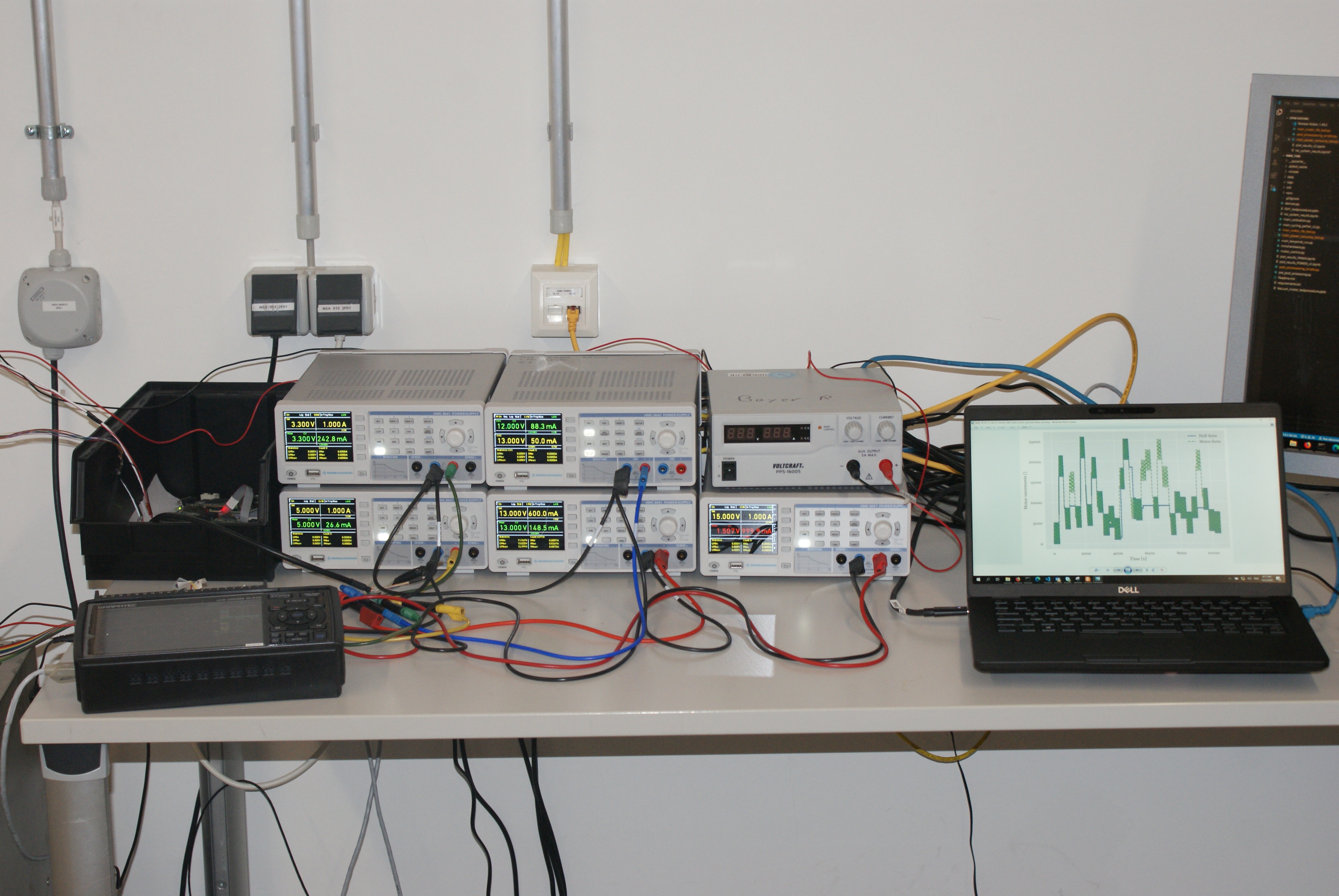
Python package for reading values from a Graphtec GL840 temperature logger via PyVisa. Used for data acquisition during thermal vacuum testing.
Python interface for the Rohde & Schwarz HMC8041, HMC8042, and HMC8043 power supply suite — all models in one class via PyVisa.
Python Matplotlib package that generates plots fully compatible with the TU Delft LaTeX thesis template (Utopia font).
Test Setup